
Uma equipe de pesquisadores liderada por Jiaxun Liu, Boxi Xia e Boyuan Chen desenvolveu um robô que se aproxima da eficiência máxima possível em movimento omnidirecional. Batizado de Argus, o robô foi projetado para ser isotrópico — ou seja, não possui frente, traseira, nem direções preferenciais. O artigo intitulado ‘Extreme Dynamic Symmetry Enables Omnidirectional and Multifunctional Robots’ foi publicado na revista Science Robotics, Vol. 11, Issue 114, com DOI 10.1126/scirobotics.aec1725.
Simetria inspirada na natureza
A simetria está presente em toda a natureza, desde a forma bilateral dos vertebrados até a geometria radial das estrelas-do-mar. Há décadas, especialistas em robótica tentam copiar essas formas e suas capacidades extraordinárias, criando robôs que se assemelham a humanos, cães ou insetos. No entanto, a maioria desses projetos ainda apresenta direções preferenciais de movimento e percepção.
O Argus inova ao adotar um princípio derivado matematicamente chamado isotropia dinâmica. Um objeto isotrópico apresenta as mesmas propriedades físicas em todas as direções. Para chegar a um projeto próximo ao máximo teórico dessa uniformidade, a equipe simulou mais de 1.500 configurações de robôs.
Design em dodecaedro
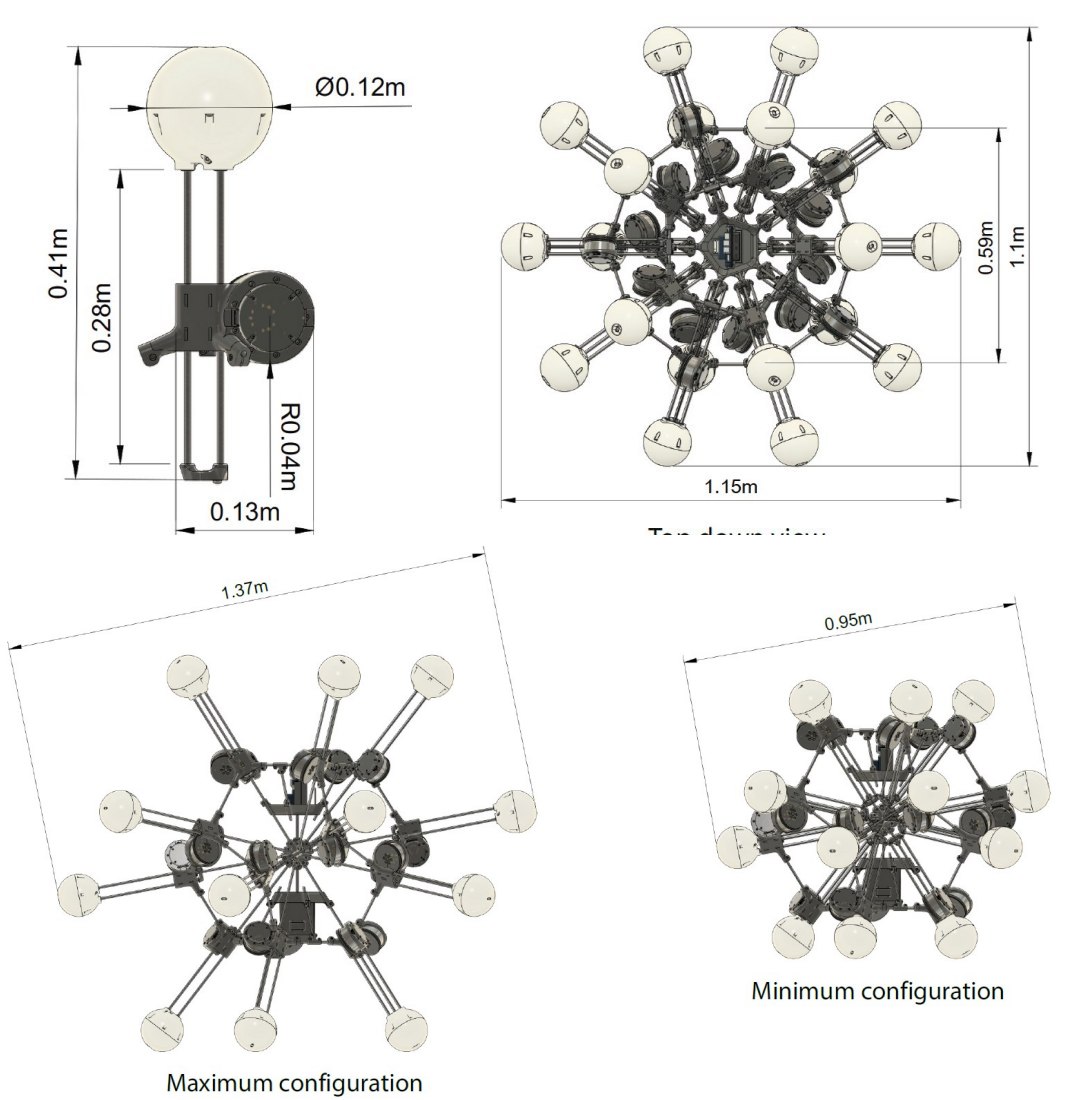
O robô Argus combina atuação e percepção em todo o corpo. Cada uma de suas 20 pernas modulares, telescópicas e equipadas com câmeras é disposta nos vértices de um dodecaedro regular — uma forma tridimensional com 12 faces pentagonais. Essa configuração produz uma distribuição quase perfeitamente uniforme de aceleração instantânea em todas as direções, bem como um campo de visão quase perfeitamente uniforme.
Liu comentou: ‘Observar o Argus em movimento é diferente de observar qualquer outro robô com o qual já trabalhamos.’ Ele acrescentou: ‘Na primeira vez que o vimos navegar entre árvores e terrenos acidentados, mesmo sob fortes colisões, soubemos que se tratava de algo diferente.’
Testes em múltiplos ambientes
Testes de campo foram feitos em múltiplos ambientes e condições. O robô demonstrou capacidade de se mover eficientemente em terrenos irregulares, mantendo estabilidade mesmo sob impactos. A simetria dinâmica permite que ele reaja a perturbações de qualquer direção sem perder o equilíbrio.
Embora a fonte não tenha detalhado aplicações comerciais imediatas, o design abre caminho para robôs exploradores, de resgate e militares que precisam operar em ambientes imprevisíveis. A pesquisa representa um avanço significativo na busca por robôs verdadeiramente omnidirecionais.
Fonte
- www.inovacaotecnologica.com.br
- Seguir no Google Notícias (news.google.com)